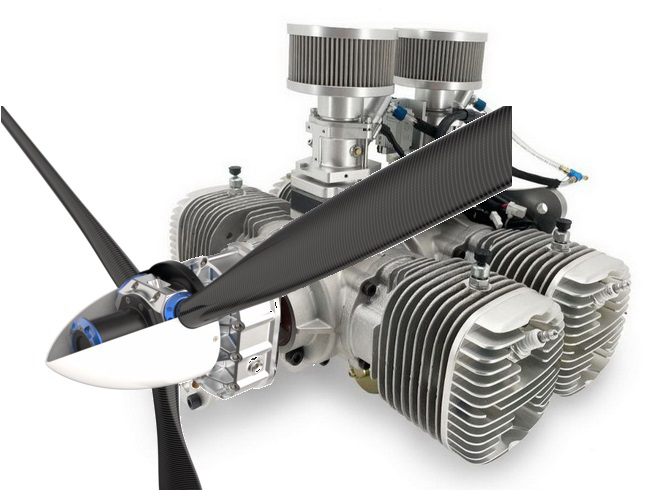
 Двигун внутрішнього згоряння – це не тільки автомобільний двигун. В авіації вже понад 100 років ДВЗ називають поршневим двигуном. І всю першу половину 20 століття поршневі двигуни панували в авіації. І саме такі двигуни сьогодні встановлені на безпілотних літальних апаратах – БПЛА. Причому потужності там вже цілком автомобільні – у деяких 4-циліндрових зразків потужність перевищує 50-60 к.с. Тільки у них є одна особливість – замість трансмісії та коліс у них… повітряний гвинт. Хоча і трансмісія у вигляді понижувального редуктора також зустрічається.
Двигун внутрішнього згоряння – це не тільки автомобільний двигун. В авіації вже понад 100 років ДВЗ називають поршневим двигуном. І всю першу половину 20 століття поршневі двигуни панували в авіації. І саме такі двигуни сьогодні встановлені на безпілотних літальних апаратах – БПЛА. Причому потужності там вже цілком автомобільні – у деяких 4-циліндрових зразків потужність перевищує 50-60 к.с. Тільки у них є одна особливість – замість трансмісії та коліс у них… повітряний гвинт. Хоча і трансмісія у вигляді понижувального редуктора також зустрічається.
Найбільш поширений зараз 2-тактний двигун, який має мінімальну кількість деталей, мінімальні габаритні розміри та масу через відсутність газорозподільного механізму. При цьому характерно, що за приблизно 80-90 років розвитку такі мотори зазнали серйозних змін і вдосконалень. Так, продування циліндрів замість одноканального стало багатоканальним, управління впуском замість поршня взяв на себе пелюстковий клапан, а карбюратор був замінений форсунками електронного упорскування палива, в деяких моделях – прямого, безпосередньо в циліндр.
 Це серйозно покращило характеристики потужності 2-тактних двигунів – питома потужність окремих зразків за 80-90 років зросла в 3-4 і більше разів. Відповідно, значно покращилися показники економічності, за якими 2-тактний двигун впритул наблизився до 4-тактного.
Це серйозно покращило характеристики потужності 2-тактних двигунів – питома потужність окремих зразків за 80-90 років зросла в 3-4 і більше разів. Відповідно, значно покращилися показники економічності, за якими 2-тактний двигун впритул наблизився до 4-тактного.
Разом з тим, незважаючи на те, що традиційні матеріали давно вже замінені на сучасні набагато стабільніші та міцніші, а системи керування двигуном стали повністю електронними, у конструкції силової установки БПЛА залишився стародавній елемент, який практично не зазнав жодних змін – це повітряний гвинт постійного кроку.
Саме гвинт сьогодні є одним із елементів, що гальмують подальший розвиток цієї технології. Так, за зміни швидкості польоту змінюється кут натікання потоку повітря на лопаті гвинта. Але гвинт “не любить” занадто великих і занадто малих кутів – у першому випадку двигун не може обертати “важкий” гвинт і знижує оберти, а в другому, навпаки, може піти врознос із “легким” гвинтом. В обох випадках тяга гвинта падає, що робить гвинт ефективним лише у досить вузькому діапазоні швидкостей. Наприклад, якщо потрібна хороша тяга для зльоту, то максимальна швидкість БПЛА навряд чи буде більше 230-250 км/год, а крейсерська не перевищить 180 км/год.
 Деякі фахівці побачили вирішення проблеми збільшення швидкості польоту у використанні реактивних двигунів. Але це виявилося проблематично через труднощі технічного та технологічного характеру. В результаті турбореактивні двигуни поки що мають досить обмежене застосування і явно поступаються поршневим в дальності польоту, а пульсуючі повітряно-реактивні двигуни взагалі практично не набули поширення.
Деякі фахівці побачили вирішення проблеми збільшення швидкості польоту у використанні реактивних двигунів. Але це виявилося проблематично через труднощі технічного та технологічного характеру. В результаті турбореактивні двигуни поки що мають досить обмежене застосування і явно поступаються поршневим в дальності польоту, а пульсуючі повітряно-реактивні двигуни взагалі практично не набули поширення.
Саме це стало причиною нашої розробки. Прагнення вищої швидкості необов’язково вимагає перескакування через цілий етап розвитку поршневої авіації – механізм зміни кроку гвинта. Саме регулювання кута установки лопатей дозволяє збільшити швидкість польоту в 3 і навіть у 4 рази на тій же моторній і технологічній базі, використовуючи механізм зміни кроку як спеціальну приставку-бустер.
Однак, щоб спроектувати такий механізм, необхідно розрахувати сили, що діють у польоті на лопаті і сам механізм. Тобто фактично треба розрахувати гвинт – знайти його діаметр, кут лопатей (крок), силу тяги, потужність на привід тощо. І все це у заданому діапазоні швидкостей.
 Сказано – зроблено. Ми підключили до роботи штучний інтелект в особі ChatGPT і спільними зусиллями створили алгоритм та програму розрахунку гвинта, яку назвали EngPDrive – двигун-гвинт-привід. За допомогою програми, маючи характеристики свого двигуна, можна отримати параметри свого повітряного гвинта в режимі проектування розрахунку програми. А потім можна перевірити цей гвинт у віртуальному польоті за допомогою так званого прямого режиму розрахунку, в якому гвинт перевіряється за різних швидкостей польоту.
Сказано – зроблено. Ми підключили до роботи штучний інтелект в особі ChatGPT і спільними зусиллями створили алгоритм та програму розрахунку гвинта, яку назвали EngPDrive – двигун-гвинт-привід. За допомогою програми, маючи характеристики свого двигуна, можна отримати параметри свого повітряного гвинта в режимі проектування розрахунку програми. А потім можна перевірити цей гвинт у віртуальному польоті за допомогою так званого прямого режиму розрахунку, в якому гвинт перевіряється за різних швидкостей польоту.
Таких чи аналогічних програм на сьогодні у світі не існує. У нас зараз єдине місце, де протягом 15 секунд можна з’ясувати, який діаметр і крок гвинта, а також редуктор потрібний конкретному двигуну для досягнення максимальної тяги в заданому діапазоні швидкостей польоту.
Враховуючи актуальність теми, на наступному етапі нашої розробки програму буде доповнено алгоритмами проектування БПЛА з визначенням злітної маси, розмірів та мас елементів, запасу палива на борту та моделювання польоту. Заключним алгоритмом буде проектування механізму зміни кроку гвинта. Більшість цих алгоритмів будуть доступні в майбутньому (хоча вони вже налагоджені, потрібен час на розміщення та адаптацію програм на сайті), сьогодні вже можна почати з повітряного гвинта та редуктора. Для цього ми розмістили програму розрахунку гвинта на нашому сайті https://pulsejet-sim.com, та запрошуємо всіх бажаючих…